Mayeryn AI Vision Picker
Description
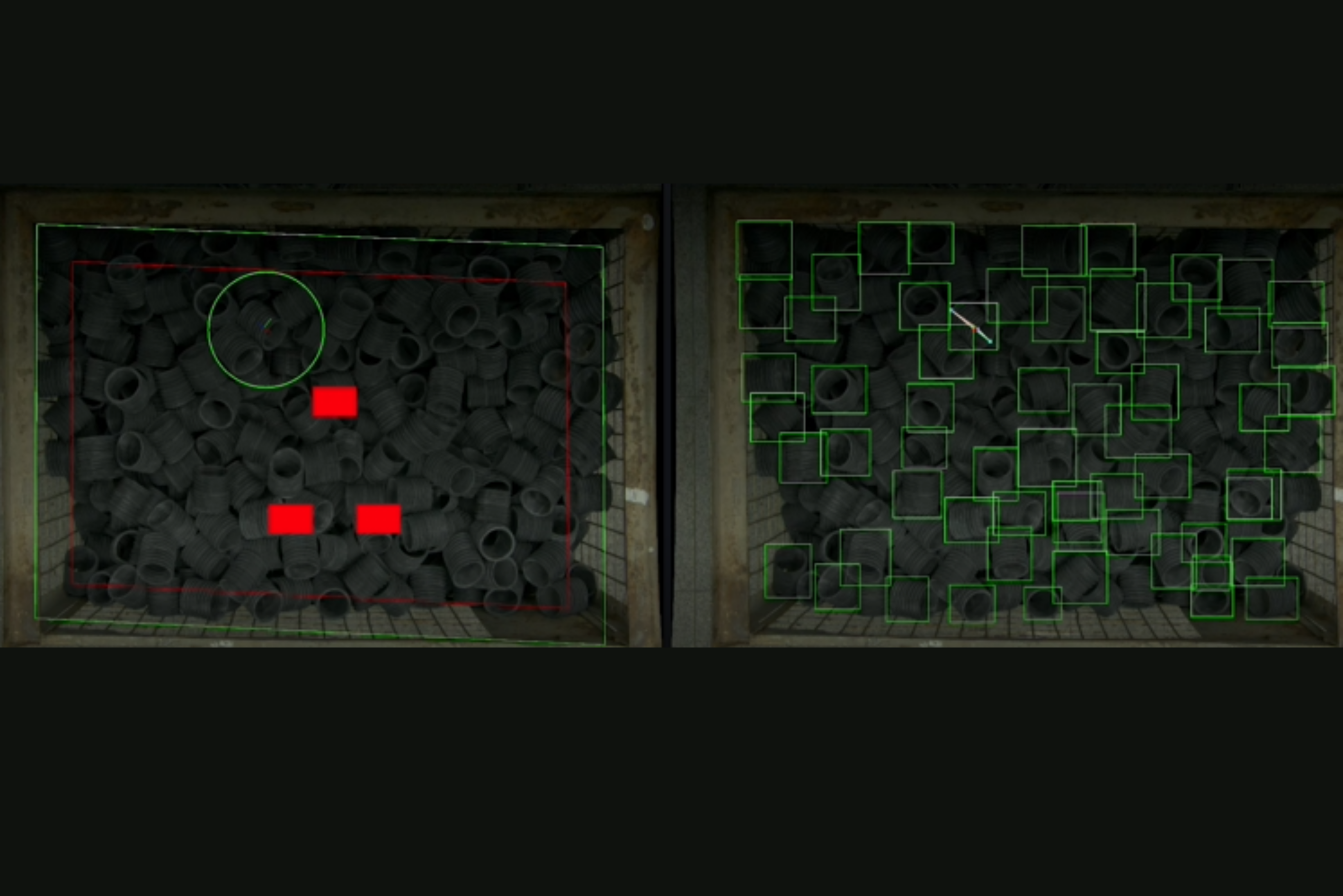
An advanced system for locating and picking elements from baskets, belts, and bins. It combines AI for detection with 3D geometry to calculate the exact position and orientation of the element and provide the robot with the optimal picking point.


The system:
Video presenting the operation of Mayeryn AI Vision Picker
- > is suitable for guiding robots, cobots, and other 2 to 7-axis manipulators
- > can operate in 2D and 3D space
- > can work with any camera (2D and 3D), lidar, sonar, radar, or X-ray
Video presenting the operation of Mayeryn AI Vision Picker
For what materials?
It is perfectly suited for applications involving picking from a cardboard box, bin, pallet, container, conveyor belt, or table, elements in random positions and random orientations, and then precisely positioning them in a designated place.
It also performs well with elements with irregular shapes (e.g., car parts), unstable and flaccid materials such as rubber, EPDM, meat, fish, and cemented carbide elements before sintering.
It is perfectly suited for applications involving picking from a cardboard box, bin, pallet, container, conveyor belt, or table, elements in random positions and random orientations, and then precisely positioning them in a designated place.
It also performs well with elements with irregular shapes (e.g., car parts), unstable and flaccid materials such as rubber, EPDM, meat, fish, and cemented carbide elements before sintering.
Key features
- > Detection and recognition of the element's shape.
- > Orientation approximation based on characteristic features.
- > 3D position determination from 3D TOF cameras.
- > Generating picking trajectories for robots.
- > Integration with PLC and Python servers (Modbus, TCP/IP).
Specifications
- > Capacity: 1–5 images/s – depending on the density of elements (can be increased);
- > Element analysis time: 50–1000 ms (can be shortened);
- > Number of training base images: 100 – 5000 images;
- > Picking accuracy: 5–25 mm, depending on the camera distance and object type (accuracy can be increased up to 0.05 mm);
- > Handling difficult elements: reflections, high contrast, irregular shapes;
- > Queuing and multithreading system;
Scalability
Mayeryn AI Vision Picker is scalable thanks to its modular design, so it can be used in simple applications that do not require high precision or processing speed, as well as in systems where hundreds of gigabytes must be processed every second, with precision at the level of hundredths of a millimeter and infallibility at the level of 99.95%.
Video presenting the operation of the line, which is based on Mayeryn AI Vision
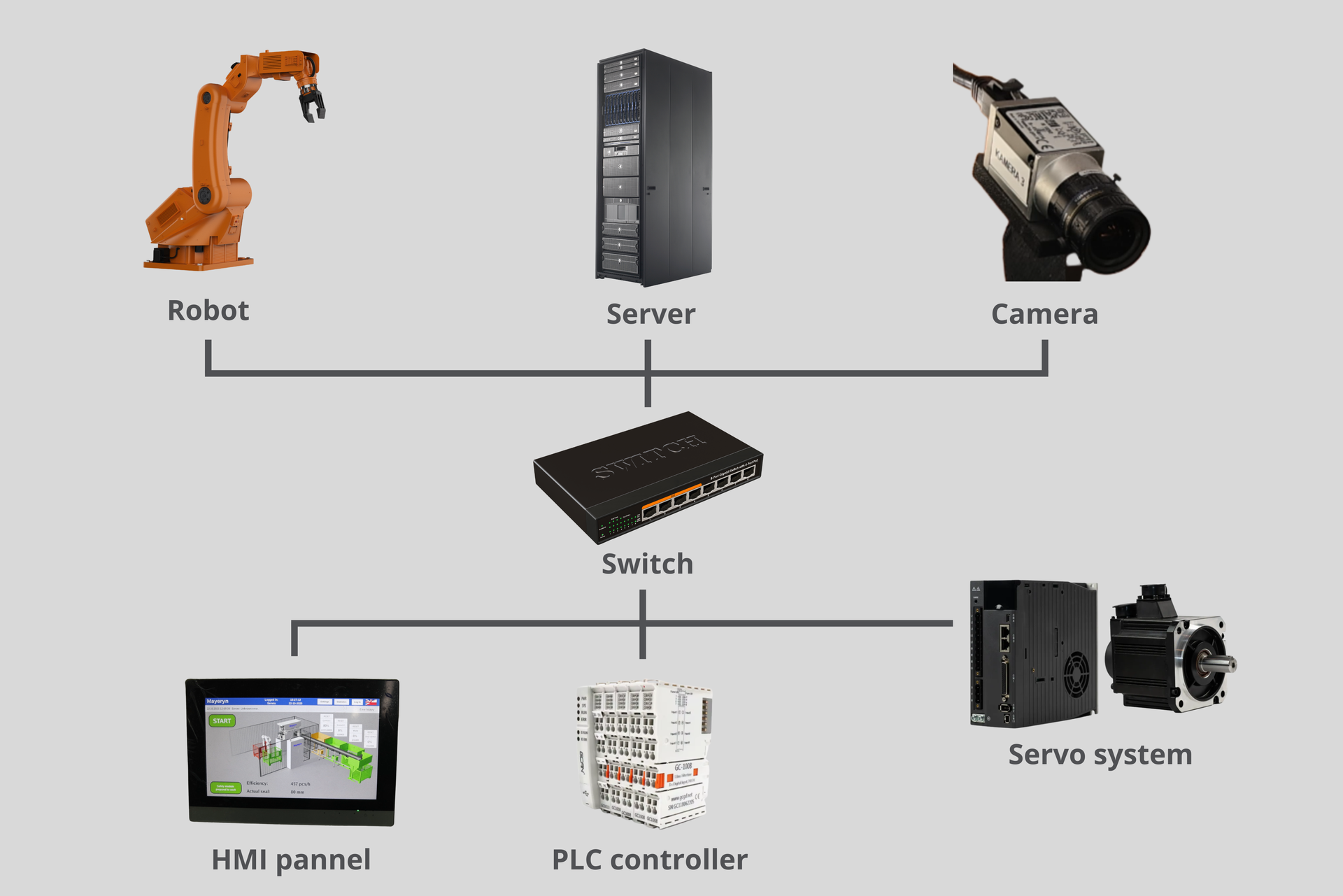
Equipment list
- > High-resolution 2D camera > 20Mpx;
- > 3D camera;
- > Image processing server;
- > PLC + Actuators;
- > Optional integration with an ABB robot via a communication module;

Additional improvements
- > Automatic error logging and work tracking;
- > Operator panel/WebUI (camera preview, parameter changes, statistics);
- > Active learning mode – the system itself asks the operator to add missing labels and adds them to the training database;
- > Anomaly detection (unsupervised), useful when defects are difficult to define;

