Mayeryn AI Vision Picker
Opis
Zaawansowany system do lokalizacji i podnoszenia elementów z koszy, taśm i skrzyń. Łączy AI do detekcji z geometrią 3D, aby obliczyć dokładne położenie i orientację elementu oraz podać robotowi optymalny punkt chwytu.


System:
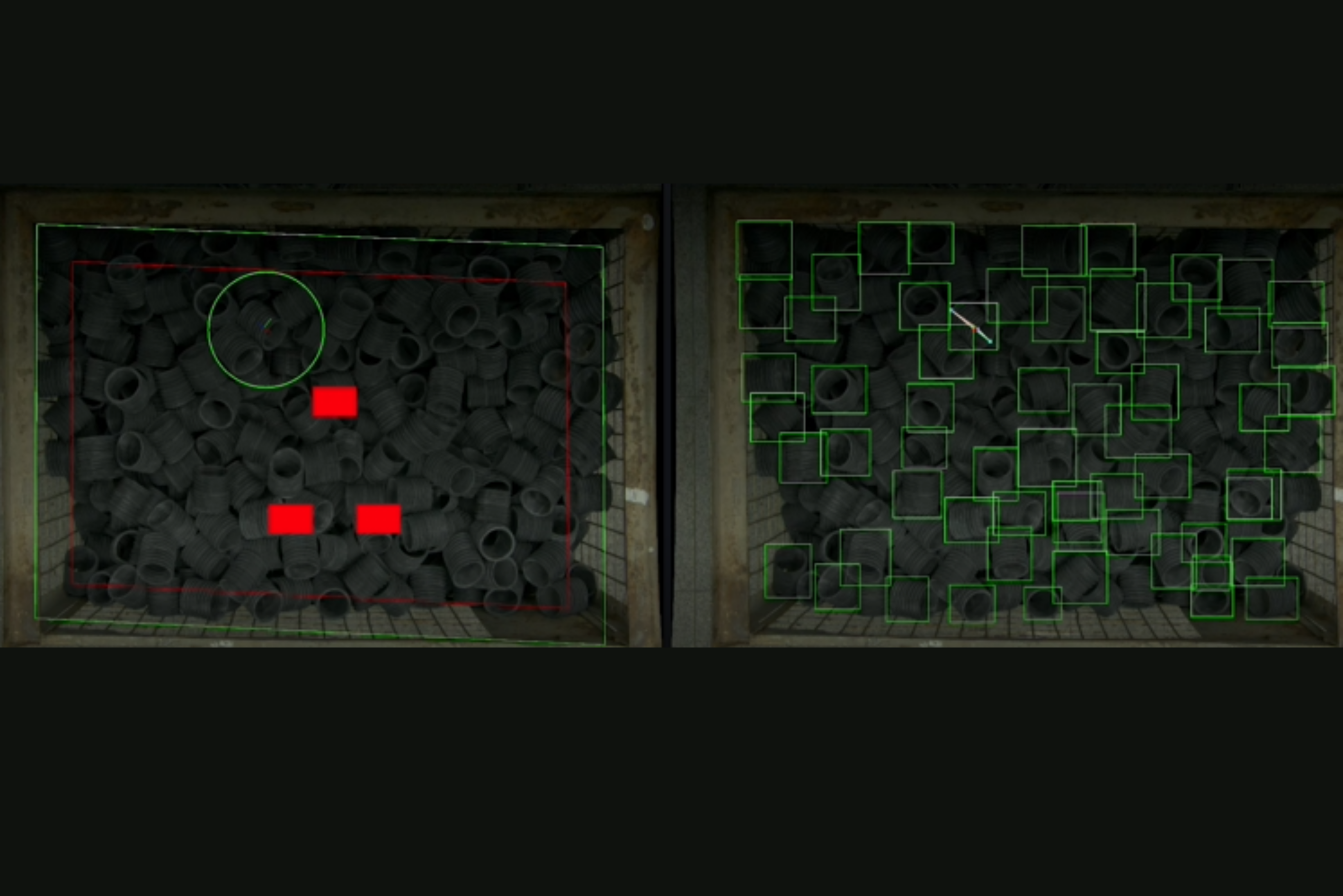
Nagranie przedstawiające działanie Mayeryn AI Vision Picker
- > nadaje się do kierowania robotami, cobotami oraz innymi manipulatorami 2 - 7 osiowymi
- > może działać w przestrzeni 2D oraz 3D
- > może współpracować z dowolną kamerą (2D oraz 3D), lidarem, sonarem, radarem, czy rentgenem
Nagranie przedstawiające działanie Mayeryn AI Vision Picker
Do jakich materiałów?
Doskonale nadaje się do aplikacji wybierania z kartonu, skrzyni, palet, pojemnika, przenośnika taśmowego czy stołu, elementów w losowych pozycjach i losowej orientacji, a następnie precyzyjnym ich pozycjonowaniu w wyznaczonym miejscu.
Dobrze radzi sobie także z elementami o nieregularnych kształtach (np. części samochodowe), materiałami niestabilnymi i wiotkimi jak np. guma, EPDM, mięso, ryby, elementy z węglików spiekanych przed ich spieczeniem.
Doskonale nadaje się do aplikacji wybierania z kartonu, skrzyni, palet, pojemnika, przenośnika taśmowego czy stołu, elementów w losowych pozycjach i losowej orientacji, a następnie precyzyjnym ich pozycjonowaniu w wyznaczonym miejscu.
Dobrze radzi sobie także z elementami o nieregularnych kształtach (np. części samochodowe), materiałami niestabilnymi i wiotkimi jak np. guma, EPDM, mięso, ryby, elementy z węglików spiekanych przed ich spieczeniem.
Kluczowe funkcje
- > Detekcja i rozpoznanie kształtu elementu.
- > Aproksymacja orientacji na podstawie cech charakterystycznych.
- > Wyznaczanie pozycji 3D z kamer 3D TOF.
- > Generowanie trajektorii chwytu dla robotów.
- > Integracja z PLC i serwerami Python (Modbus, TCP/IP).
Specyfikacje
- > Wydajność: 1–5 zdjęć/s – zależnie od zagęszczenia elementów (możliwość zwiększenia);
- > Czas analizy elementu: 50–1000 ms (możliwość skrócenia);
- > Liczba zdjęć bazy treningowej: 100 – 5000 zdjęć;
- > Dokładność chwytu: 5–25 mm, zależnie od odległości kamery i typu obiektu (możliwe zwiększenie dokładności do 0,05 mm);
- > Obsługa trudnych elementów: odbicia, wysoki kontrast, nieregularne kształty;
- > System kolejkowania i wielowątkowości;
Skalowalność
Mayeryn AI Vision Picker dzięki swej modułowej budowie jest skalowany, dzięki temu jego wykorzystanie ma zastosowanie w prostych aplikacjach niewymagających dużej precyzji ani prędkości przetwarzania, jak również w systemach gdzie w każdej sekundzie wymagane są setki gigabajtów do przetworzenia, precyzja na poziomie setnych milimetra oraz nieomylność na poziomie 99,95%.
Nagranie przedstawiające działanie linii, której działanie oparte jest na Mayeryn AI Vision
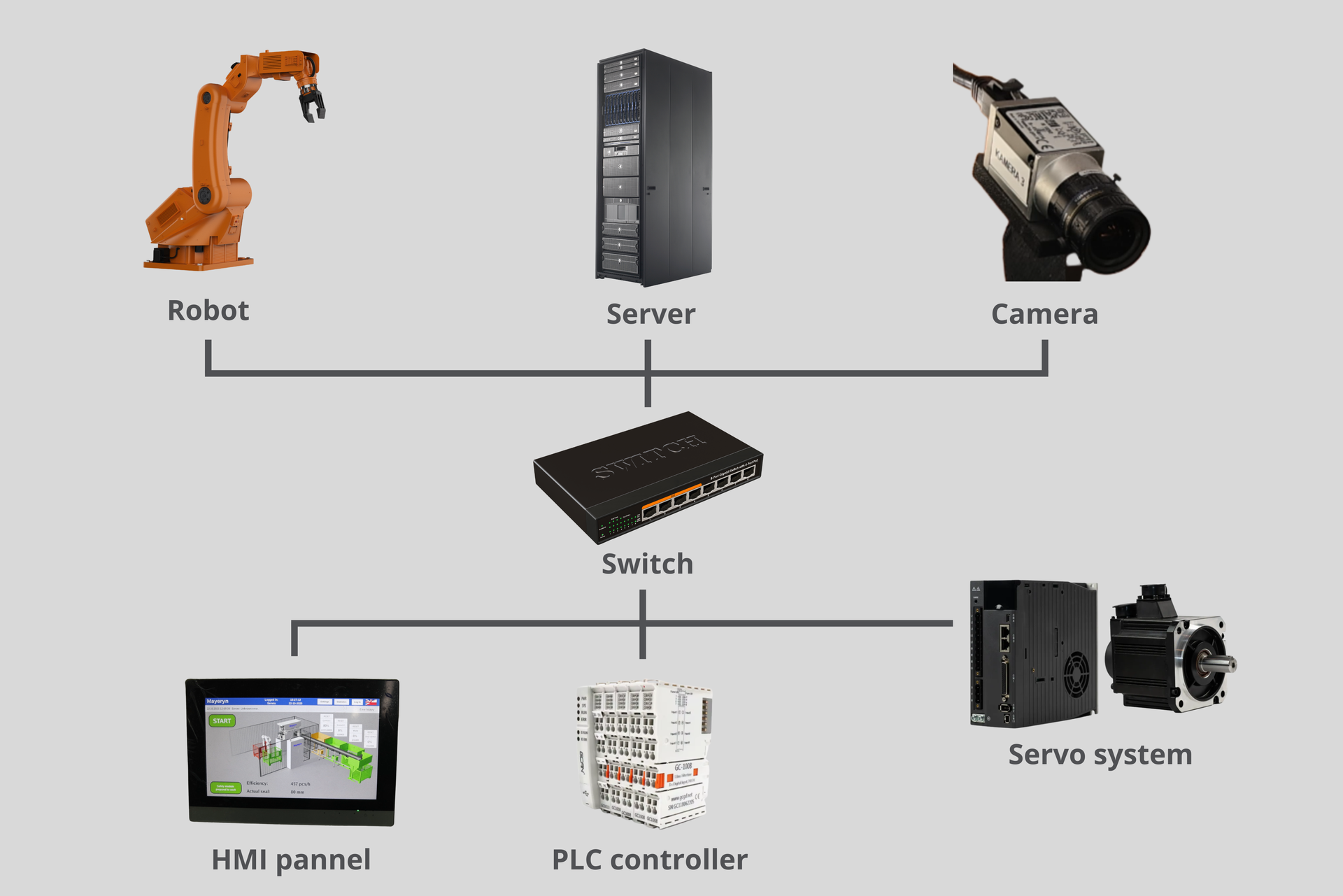
Wykaz sprzętu
- > Kamera 2D wysokiej rozdzielczości > 20Mpx;
- > Kamera 3D;
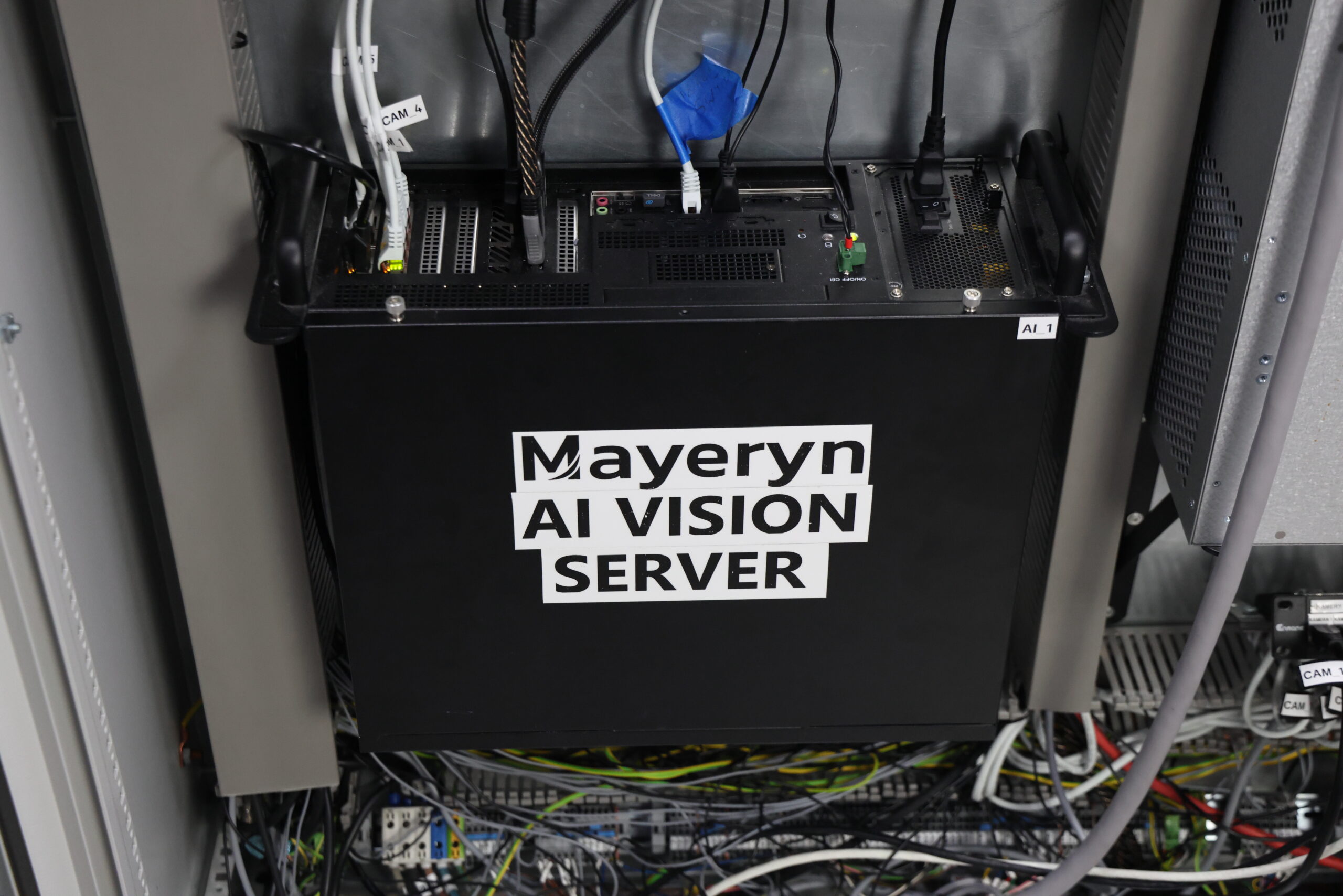
- > Serwer przetwarzania obrazu;
- > PLC + Elementy wykonawcze;
- > Opcjonalnie integracja z robotem ABB przez moduł komunikacyjny;

Dodatkowe Usprawnienia
- > Automatyczne logowanie błędów i śledzenie pracy;
- > Panel operatorski/WebUI (podgląd kamer, zmiana parametrów, statystyki);
- > Tryb uczenia aktywnego – system sam prosi operatora o dopisanie brakujących etykiet i dodaje je do bazy treningowej;
- > Wykrywanie anomalii (unsupervised), przydatne, gdy trudno zdefiniować defekty;

